
UE 补完计划(四) 导航系统-2
前言:场景体素化
UE4的导航使用的是RecastDetour组件,这是一个开源组件,主要支持3D场景的导航网格导出和寻路,或者有一个更流行的名字叫做NavMesh。不管是Unity还是UE都使用了这一套组件。不过UE4对其算法做了不小的修改。
Github上有更为详细的源码、Demo和说明:https://github.com/recastnavigation/recastnavigation
本文使用的UE4源码版本为4.24.3,2020年2月25日的版本。
Recast采用了体素化的方式,来生成导航网格。大致分为三个步骤:
-
将场景体素化。形成一个多层的体素模型。
-
将不同层的体素模型划分为可重叠的2D区域。不同层的2D区域不同
-
沿着边界区域剥离出导航凸多边形。
本文将介绍第一部分,将场景体素化,以及后续的可行走层的过滤。
体素概念介绍
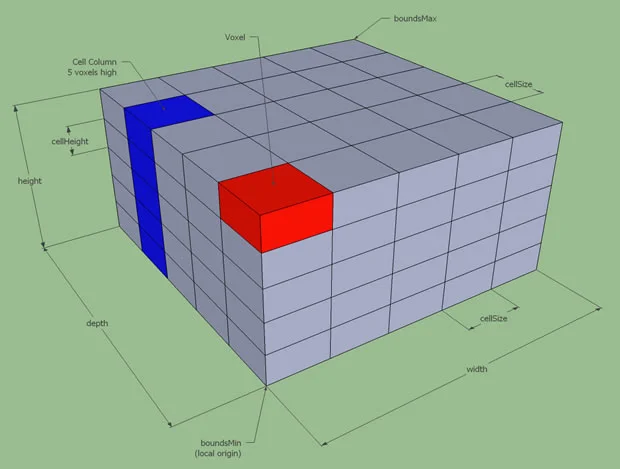
体素的概念和像素类似,将三维空间分成一个个的小格子,如下图所示:
然后是一个概念span:代表某一方向上连续的格子。
体素化的目的,就是为了将整个场景转换为一个个格子内的体素,并标记每个span的可行走状态。以方便后续做区域划分和寻路。
体素化流程
这一部分会直接使用整个场景所有物件的顶点和三角形数据。大致分为两个步骤:
-
标记可行走的面。逻辑主要在
rcMarkWalkableTrianglesCos()函数中 -
将网格光栅化。逻辑主要在
rcRasterizeTriangles()函数中 -
过滤可行走表面。逻辑主要在
GenerateCompressedLayers()中
标记可行走的面
这部分逻辑主要在rcMarkWalkableTrianglesCos()函数中。
会遍历所有网格的三角形,并计算法线方向。如果发现方向与垂直方向的夹角小于某个配置的值,那么认为这是可行走的。 整个函数的实现也很简单。如下:
1 | void rcMarkWalkableTrianglesCos(rcContext* /*ctx*/, const float walkableSlopeCos, const float* verts, int /*nv*/, const int* tris, int nt, unsigned char* areas) |
将网格光栅化
这部分逻辑主要在rcRasterizeTriangles()函数中。更准确说是在rasterizeTri()函数中。
这里使用光栅化这个词,因为Rasterize和渲染管线中的Rasterize是一毛一样的。都是将三角形投影到矩阵(像素或者体素)中。
光栅化的目的,就是找出连续的小格子。不管是连续的开放空间还是连续的密闭空间。光栅化时,也是以三角形为基本单位的。注意这里的坐标系:xz是水平,y是垂直。
这里对着源码简述一下其算法(UE4基本上重写了rasterizeTri()函数。我理解主要为了优化性能。与原始代码相比,增加了更多的直接指针操作,优化了三角形位于一个平面上的情况的性能,减少了函数调用的栈开销。全部用EPIC_ADDITION_USE_NEW_RECAST_RASTERIZER宏包裹。但是不得不吐槽,可读性比Recast源码还差。。)
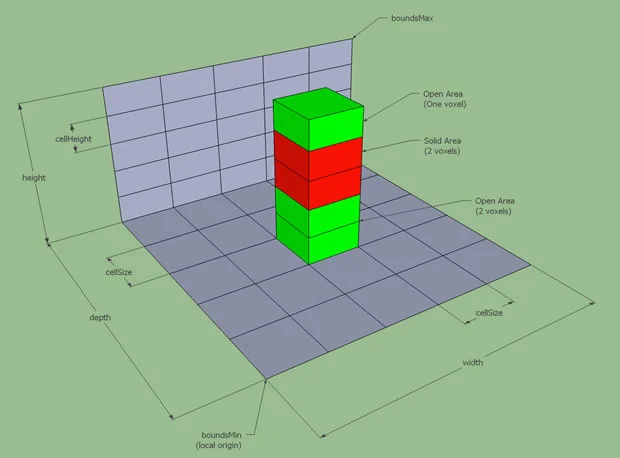
首先说明一个概念span:代表某一方向上连续的格子。
在上图中,(2,2)这个xz平面的格子上,就有三个span。绿色代表开放空间,红色代表密闭空间。
-
记录xz平面三角形的投影,是一个AABB的包围盒。
关键源码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15// 这是平面上的点,标记三个顶点分别位于哪个格子
int intverts[3][2];
intverts[0][0] = (int)floorf((v0[0] - bmin[0])*ics);
intverts[0][1] = (int)floorf((v0[2] - bmin[2])*ics);
intverts[1][0] = (int)floorf((v1[0] - bmin[0])*ics);
intverts[1][1] = (int)floorf((v1[2] - bmin[2])*ics);
intverts[2][0] = (int)floorf((v2[0] - bmin[0])*ics);
intverts[2][1] = (int)floorf((v2[2] - bmin[2])*ics);
// 这个三角形所投影出来的AABB包围盒,一个矩形
int x0 = intMin(intverts[0][0], intMin(intverts[1][0], intverts[2][0]));
int x1 = intMax(intverts[0][0], intMax(intverts[1][0], intverts[2][0]));
int y0 = intMin(intverts[0][1], intMin(intverts[1][1], intverts[2][1]));
int y1 = intMax(intverts[0][1], intMax(intverts[1][1], intverts[2][1])); -
在xz平面上,依次遍历三角形的三条边,三条边经过的格子之间划分成一个FlatSpan。
具体原理是按照z轴遍历,并记录某一格z值上的x的最大值和最小值。其数据结构如下:
1
2
3
4
5
6
7
8
9
10
11struct rcHeightfield
{
// ...
rcEdgeHit* EdgeHits; ///< h + 1 bit flags that indicate what edges cross the z cell boundaries
// 记录了每一个z值上x的最大值和最小值
rcRowExt* RowExt; ///< h structs that give the current x range for this z row。row代表z,col代表x
rcTempSpan* tempspans; ///< Heightfield of temp spans (width*height).
};
核心算法可以概括为:
- 记录三角形区域的三条边对应的格子,三条边中间的格子是需要去记录竖直方向体素的格子。
- 记录三角形中间的格子竖直方向连续格子的边界。
注意,这个阶段只是标记连续的实心span。至于span是否可行走,则是在第一个阶段通过判断法线方向与竖直方向的夹角就完成了。实际寻路和后续区域划分用到的都是空心span,会在下一个阶段根据实心span取反生成。
核心算法源代码如下:
1 | // 记录沿着z方向(Col)的连续格子 |
合并span的核心源码如下:
1 | static void addSpan(rcHeightfield& hf, const int x, const int y, const unsigned short smin, const unsigned short smax, const unsigned char area, const int flagMergeThr) |
过滤可行走表面
分为三步:
-
若一个span标记为可行走,那么位于它上方且高度相差小于walkableClimb的span也应标记为可行走。典型的场景:楼梯台阶。对应的函数为
rcFilterLowHangingWalkableObstacles()核心源码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17void rcFilterLowHangingWalkableObstacles(rcContext* ctx, const int walkableClimb, rcHeightfield& solid)
{
// ...
for (rcSpan* s = solid.spans[x + y*w]; s; ps = s, s = s->next)
{
const bool walkable = s->data.area != RC_NULL_AREA;
if (!walkable && previousWalkable)
{
// 如果当前不可行走,但是其下方span可行走,且两者高度差小于walkableClimb,那么认为当前可行走
if (rcAbs((int)s->data.smax - (int)ps->data.smax) <= walkableClimb)
s->data.area = previousArea;
}
previousWalkable = walkable;
previousArea = s->data.area;
}
// ...
} -
如果一个span和其邻居之间的高度差过大,超过了walkableClimb,那么认为自己在陡坡上,不可达。另外如果其邻居之间的高度差过大,也认为不可达。对应的函数为
rcFilterLedgeSpans()核心源码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64void rcFilterLedgeSpans(rcContext* ctx, const int walkableHeight, const int walkableClimb, rcHeightfield& solid)
{
// 三维来遍历每个span...
{
// 当前span的最顶部
const int bot = (int)(s->data.smax);
// 其上方span的最底部
const int top = s->next ? (int)(s->next->data.smin) : MAX_HEIGHT;
// 表示自己和邻居之间的高度差
int minh = MAX_HEIGHT;
// 可达邻居的最小高度
int asmin = s->data.smax;
// 可达邻居的最大高度
int asmax = s->data.smax;
for (int dir = 0; dir < 4; ++dir)
{
// 遍历四个邻居
// ...
rcSpan* ns = solid.spans[dx + dy*w];
// 从可以攀爬的-walkableClimb开始
int nbot = -walkableClimb;
// 邻居span的最底部
int ntop = ns ? (int)ns->data.smin : MAX_HEIGHT;
// 判断邻居和自己的缝隙的高度差是否容许一个人通过
if (rcMin(top,ntop) - rcMax(bot,nbot) > walkableHeight)
minh = rcMin(minh, nbot - bot);
for (ns = solid.spans[dx + dy*w]; ns; ns = ns->next)
{
// 遍历邻居竖直方向的所有span
nbot = (int)ns->data.smax;
ntop = ns->next ? (int)ns->next->data.smin : MAX_HEIGHT;
if (rcMin(top,ntop) - rcMax(bot,nbot) > walkableHeight)
{
// 和邻居的地面的高度差
minh = rcMin(minh, nbot - bot);
// Find min/max accessible neighbour height.
if (rcAbs(nbot - bot) <= walkableClimb)
{
// 如果高度差可以攀爬,认为该邻居可达,那么记录可达邻居的最小高度asmin和最大高度asmax
if (nbot < asmin) asmin = nbot;
if (nbot > asmax) asmax = nbot;
}
}
}
}
// 自己和邻居之间的地面的高度差。如果过大,那么认为不可达
if (minh < -walkableClimb)
s->data.area = RC_NULL_AREA;
// 比较可达邻居之间的高度差。如果不同邻居之间高度相差过大,则认为在陡坡上,自己也不可达
if ((asmax - asmin) > walkableClimb)
{
s->data.area = RC_NULL_AREA;
}
}
// ...
} -
如果某个span可行走,但是其上方有不可行走的障碍物,也认为不可行走。实现函数为
rcFilterWalkableLowHeightSpans()。源码也非常非常简单。1
2
3
4
5
6
7
8
9
10
11
12
13for (int y = 0; y < h; ++y)
{
for (int x = 0; x < w; ++x)
{
for (rcSpan* s = solid.spans[x + y*w]; s; s = s->next)
{
const int bot = (int)(s->data.smax);
const int top = s->next ? (int)(s->next->data.smin) : MAX_HEIGHT;
if ((top - bot) <= walkableHeight)
s->data.area = RC_NULL_AREA;
}
}
}
总结
至此,从源码层面分析了UE4是如何将场景体素化的。总体来看,并没有使用大量射线或者三角函数,而是简单的利用遍历、大小值比较、比例换算,以及基本的指针操作来省去函数调用压栈的开销,甚至为了优化计算速度使用乘法来代替除法。之前我们的项目组,体素方案是使用从上往下打射线的方式来实现的,用于线下制作没问题,代码也简单一些,但是速度比起来就差很多了。
下一篇将会讲述区域划分的流程。


