
UE 补完计划(四) 导航系统-3
前言:区域生成
UE4的导航使用的是RecastDetour组件,这是一个开源组件,主要支持3D场景的导航网格导出和寻路,或者有一个更流行的名字叫做NavMesh。不管是Unity还是UE都使用了这一套组件。
Github上有更为详细的源码、Demo和说明:https://github.com/recastnavigation/recastnavigation
本文使用的UE4源码版本为4.24.3,2020年2月25日的版本。
Recast采用了体素化的方式,来生成导航网格。大致分为三个步骤:
-
将场景体素化。形成一个多层的体素模型。
-
将不同层的体素模型划分为可重叠的2D区域。不同层的2D区域不同
-
沿着边界区域剥离出导航凸多边形。
在上一篇文章,讲述了场景体素化的过程。现在我们已经有了rcHeightField数据,标记了场景中所有的span以及每个span的可行走标记。接下来会根据这些数据来生成实际使用的导航网格区域。
区域生成流程
这一部分会使用之前生成的rcHeightField数据。大致分为两个步骤:
-
初始化
CompactHeightfield数据。记录所有的连续的span的高度,并计算与周围span的连通关系。逻辑主要在rcBuildCompactHeightfield()函数中 -
裁剪可行走区域。会根据
walkableRadius,从边缘开始计算,压缩可行走区域的范围。 -
划分区域。将一个或者多个巨大的连续空间划分为一个个小区域。有三种划分区域的算法:
Watershed、Monotone、Chunky。区域划分算法会在下一篇用单独一篇来详细讲解。
初始化 CompactHeightfield 数据
这部分逻辑主要在rcBuildCompactHeightfield()函数中。
其实主要就干了两件事:
-
找出空心区域
-
计算空心区域与邻居空心区域的连通性。
找出空心区域
遍历所有span,记录这个span的顶部与其上方的span的底部的距离作为高度。我们可以理解为span是一个实心连续区域,而这一步的目的就是找出空间中实心区域之外的空心区域。
一个空心区域的结构体如下:
1 | struct rcCompactSpan |
整个函数的实现也很简单。核心代码如下:
1 | while (s) |
计算连通性
计算连通性的方法与上一篇所述的过滤不可行走的突起类似。如果开放空间的高度大于walkableHeight,且邻居空间与本空间的高度差小于walkableClimb,则认为是连续的。
注意这里使用一个con位域来记录连通性信息。con是一个32bit的位域。分别记录四个方向上的索引值。如果是0,那么表示该方向上没有邻居。
计算连通性时,会遇到一个情况,如果邻居有多个联通的开放空间怎么办?就像这张图所示:
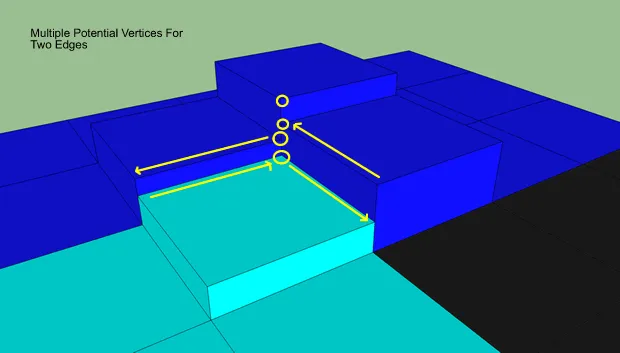
实际采取的方案是:取最上方的空间。
可以看看设置连通性的函数:
1 | inline void rcSetCon(rcCompactSpan& s, int dir, int i) |
整个计算连通性的函数核心代码如下:
1 | // 遍历所有邻居节点上的开放空间 |
裁剪可行走区域
寻路的对象(比方说人)是有宽度的。如果一个路径过窄,那么这个路径对于大胖子来说相当于是不可寻路的。这一步就是预处理这个。主要是通过walkableRadius,来对可行走区域进行重新赋值。
处理逻辑在rcErodeWalkableArea()中。
基本算法可以分为三个遍历:
-
第一次遍历:标记边界cell。dist表示某个开放空间离边界的距离。如果这个开放空间本身不可走,或者其有一个或多个邻居空间不可达,那么便将dist设为0,认为这个点是边界。
-
第二次遍历:从左下方开始压缩可行走区域。这里需要注意的地方有两点:
-
dist最后会与直径比较,而传入的radius是半径,会乘以2。因此沿着轴方向dist的值也是以2为基数增加。
-
斜下方向精确的值应该为 ,这里为了快速计算,直接近似为3。
-
x和z的坐标均从0开始。dist会从最左下累加。
-
-
第三次遍历:从右上方开始压缩可行走区域。基本算法和第二次遍历一样,只不过遍历的起始坐标不同。
核心源码如下:
1 | // 两个pass,需要从八个方向来压缩。 |
区域划分算法
现在我们得到了一个或者多个巨大的联通区域。但是寻路我们需要拥有粒度更细的数据。那么我们需要将这个巨大的联通区域划分为多个小区域。UE4(或者说Recast组件)提供了三种划分区域的算法:Watershed、Monotone和Chunky。
-
Watershed:中文名称为分水岭算法,是一种传统的划分区域的算法,在图像处理上也经常用于利用灰度值划分一张图片上的不同色块(想象一下Photoshop的魔棒工具)。
基本原理是将场景看做一张高度图。不连通的地方看做山脉,联通的区域看做盆地。向场景灌水,水会优先流入盆地。在灌水的过程中,如果两个盆地汇合,那么在汇合的交界处我们可以修一道堤坝,看做是这两个区域的交界处。 -
Monotone:是一种快速的划分区域的算法。基本原理是利用直线与多边形相交的几何性质。但是相比Watershed算法,并没有那么精确。 -
Chunky:针对小区域的Monotone算法。
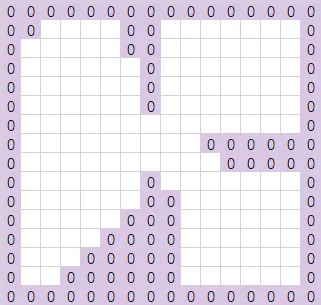
区域划分算法会在下一篇用单独的篇章详细讲解。这里大致放出区域划分的结果:
对于如图所示的区域:
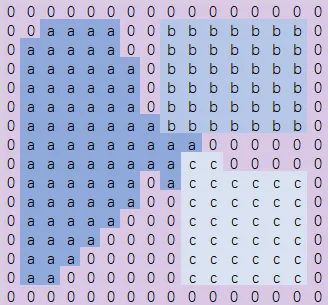
使用Watershed划分的区域如下:
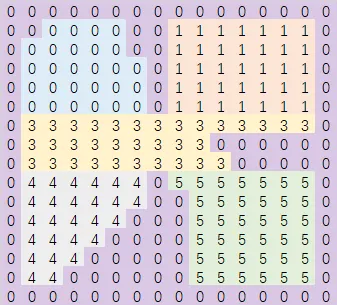
使用Monotone划分的区域如下:
为3D场景分层
现在我们有了全部的region数据。但是还有两个问题:
-
每个region是根据cellsize生成的,粒度有可能很小。实际游戏场景可能是一块大平地,整个区域的粒度不需要那么小。
-
游戏场景是3D的,每个region都有可能有不同的高度。要适配3D游戏的寻路需求,就需要将目前已有的region数据适配为3D适用的数据。
Recast的解决方案是:
-
寻找大区域的边界线。边界线中间包含的区域都可以看做是一个相连通的大区域。
-
在竖直方向上分层。
以下均以Watershed算法实现源码来讲述。
寻找边界线
算法可以概括为:
-
遍历所有span,找到位于边界旁边的span
-
如果某个方向是边界,那么标记,沿着顺时针方向找下一个。
-
如果某个方向不是边界,那么沿着逆时针方向找下一个。
-
当方向和坐标都与起始点相同时,跳出循环。
下图是一个完整的寻找边界线的过程:
核心源码在walkContour()中。
1 | static void walkContour(int x, int y, int i, int dir, rcCompactHeightfield& chf, unsigned short* srcReg, rcIntArray& cont) |
竖直方向分层
以上很多步骤,都是以二维平面来举例。包括传统的A*寻路算法也是二维平面。但是3D游戏的场景都是3D的,如何将3D游戏与传统的寻路结合起来?
整个RecastDetour组件做了这么几件事来保证支持3D寻路:
-
3D体素化的阶段记录span的信息,并会记录相邻span的连接信息
-
区域划分是以span为单元来遍历
-
为整个场景分layer
-
寻路算法依然采用A*算法,并以layer为单位
1、2是基础,3是关键。这里介绍一下分层的算法。
层的概念,就是上一步找到的一个边界线内部就是一层。分层有一个基础,就是每个span都有一个regionId。算法说起来也是很简单:
遍历所有的span,找到每个span竖直方向的其它span,将其regionId记录在layers当中。
-
遍历所有的span,找到每个span竖直方向的其它span,将其
regionId记录在layers当中。1
2
3
4
5
6
7
8
9
10
11
12// 当前span的竖直方向如果有其它span的话,将其它span所属的regionid全部记录在reg.layers中
for (int j = (int)c.index; j < ni; ++j)
{
unsigned short nri = srcReg[j];
if (nri == 0 || nri >= nreg)
continue;
if (nri != ri)
{
addUniqueLayerRegion(reg, nri);
}
} -
上一步已经介绍过的:找到每个region的边界线。
-
遍历边界线,找到边界线上的每个region,将所有region的竖直方向上的layer都合并到自己的layers中。这就是这个边界线所对应的层竖直方向有交集的其它层的集合。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57unsigned short layerId = 0;
rcIntArray stack(64);
for (int i = 0; i < nreg; i++)
{
// 遍历所有的区域
rcLayerRegion& reg = regions[i];
if (reg.visited || !reg.hasSpans)
continue;
reg.layerId = layerId;
reg.visited = true;
// 每一层只有一个region的base是true
reg.base = true;
stack.resize(0);
stack.push(i);
while (stack.size())
{
int ri = stack.pop();
rcLayerRegion& creg = regions[ri];
// 遍历当前区域的边界区域
for (int j = 0; j < creg.connections.size(); j++)
{
const unsigned short nei = (unsigned short)creg.connections[j];
if (nei & RC_BORDER_REG)
continue;
rcLayerRegion& regn = regions[nei];
// Skip already visited.
if (regn.visited)
continue;
// Skip if the neighbor is overlapping root region.
if (reg.layers.contains(nei))
continue;
// Skip if the height range would become too large.
const int ymin = rcMin(reg.ymin, regn.ymin);
const int ymax = rcMax(reg.ymax, regn.ymax);
if ((ymax - ymin) >= 255)
continue;
// visit
stack.push(nei);
regn.visited = true;
regn.layerId = layerId;
// add layers to root
// 把所有边界的竖直方向的layers全部加到自己的layers中。这一步可以保证之后按照layer为单位来合并
for (int k = 0; k < regn.layers.size(); k++)
addUniqueLayerRegion(reg, regn.layers[k]);
reg.ymin = rcMin(reg.ymin, regn.ymin);
reg.ymax = rcMax(reg.ymax, regn.ymax);
}
}
layerId++;
}
// 这个遍历过后,所有联通的区域都有着相同的layers。意味着在竖直方向上,所有区域全部分层完毕。 -
合并高度相差过小的层
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55// 高度相差很小的layer直接合并
// Merge non-overlapping regions that are close in height.
const unsigned short mergeHeight = (unsigned short)walkableHeight * 4;
{
//...双重遍历所有region
// 所有的region两两比较。遍历的时间复杂度是O(n^2)
//...过滤边界条件以及一层高度过大的情况
// 如果两者距离相差过大,直接continue
if (!overlapRange(ri.ymin,ri.ymax+mergeHeight, rj.ymin,rj.ymax+mergeHeight))
continue;
// 运行到这里说明这两个layer之间的高度相差小于mergeHeight
bool overlap = false;
for (int k = 0; k < nreg; ++k)
{
if (regions[k].layerId != rj.layerId)
continue;
// 如果ri区域的竖直方向包含区域k,说明ri和k有overlap
if (ri.layers.contains(k))
{
overlap = true;
break;
}
}
// Cannot merge of regions overlap.
if (overlap)
continue;
// Can merge i and j.
oldId = rj.layerId;
break;
}
//...遍历结束
// 真正的合并操作
for (int j = 0; j < nreg; ++j)
{
rcLayerRegion& rj = regions[j];
if (rj.layerId == oldId)
{
// 合并的操作,就是清除base、更新layerId、合并layers,三个步骤
rj.base = 0;
// Remap layerIds.
rj.layerId = newId;
// Add overlaid layers from 'rj' to 'ri'.
for (int k = 0; k < rj.layers.size(); ++k)
addUniqueLayerRegion(ri, rj.layers[k]);
// Update height bounds.
ri.ymin = rcMin(ri.ymin, rj.ymin);
ri.ymax = rcMax(ri.ymax, rj.ymax);
}
} -
重新分配layerid
这一步是因为合并layer之后,有些layerid已经失效。因此会重新分配从0开始的layerid
初始化rcHeightfieldLayer结构
将上述的数据写入到rcHeightfieldLayer类,可以供寻路算法使用。
小结
这一篇讲述了整个Recast生成导航区域数据的过程。总体来看,根据体素化过程得到的实心span数据,生成open span数据,再通过计算邻居span之间的连通性,划分出不同的区域,并在竖直方向分层,以保证3D寻路的要求。
下一篇将会着重讲述UE4用到的区域划分算法:Watershed和Monotone。


